ACTUATORS
Actuators are the “muscles” of a robot, converting electricity into physical movement.
Motors are the most common types of actuators. There are DC Motors and Servo Motors:
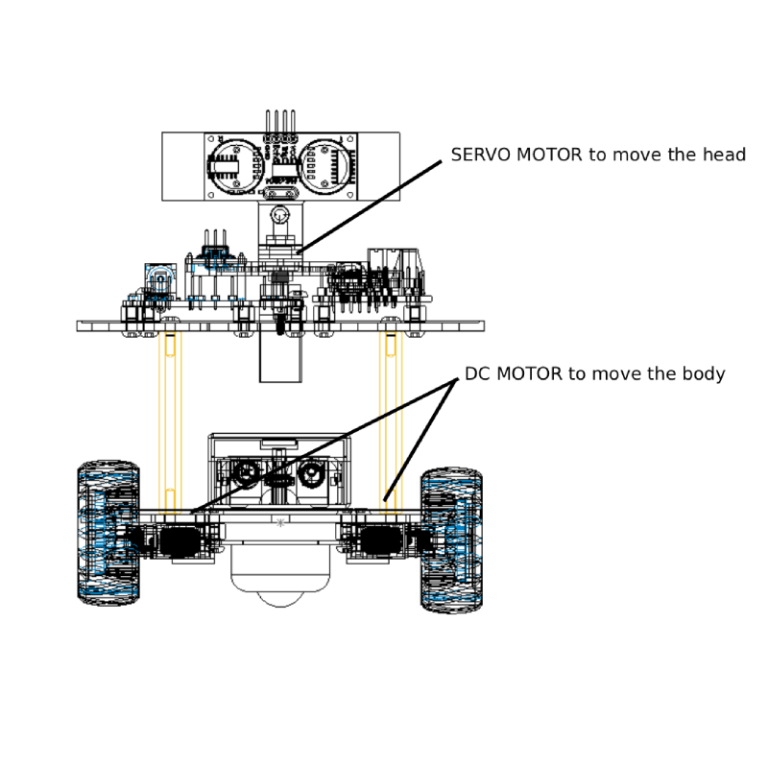
DC MOTORS
DC Motors are like the wheels on a remote-control car: it just spins round and round super fast when you give it power. You can make it go forward or backward by switching the wires, but it doesn’t know where it is — it keeps spinning until you stop the power.

Motors have 2 wires. Attach a battery and the motor spins. Swop the battery terminals around (+ve/-ve vs -ve +ve) and the motor spins in the opposite direction (reverse).
To control speed we can increase or decrease the voltage.
The 2 most important factors to consider (for us) when considering DC Motors are:
Voltage (V):
The motors we are using is rated for 6V. That’s what it was designed to operate with. If we use less the motor will move slower and more will make it go faster. However, too low and it may not turn at all and too high the motor will run too hot and burn out.
Speed:
(no-load RPM at the rated voltage)
This is how fast it spins when nothing is attached (free-wheeling). Our DC Motor is rated 100 RPM, which means at 6V it will spin 100 times in one minute.

TURL-X uses a DC Motor called the N20. It is a miniature brushed DC motor with a built-in gearbox (reduction gears) to trade super-high speed for much more torque (twisting power or strength) and slower, controlled spinning.
SERVO MOTORS

Servo Motors do not spin in a full circle, most can only turn half a circle (180 degrees). But we can control exactly where we want it to go.
That is why we use them to control robot arms or the head. It can turn to an exact spot (like 90 degrees or halfway) and hold it there perfectly, even if something pushes on it.
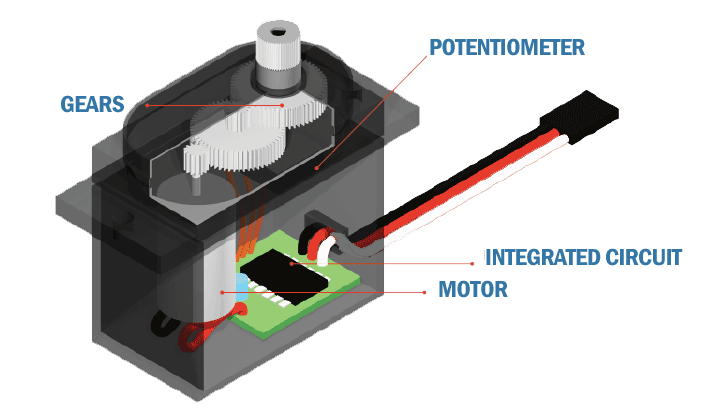
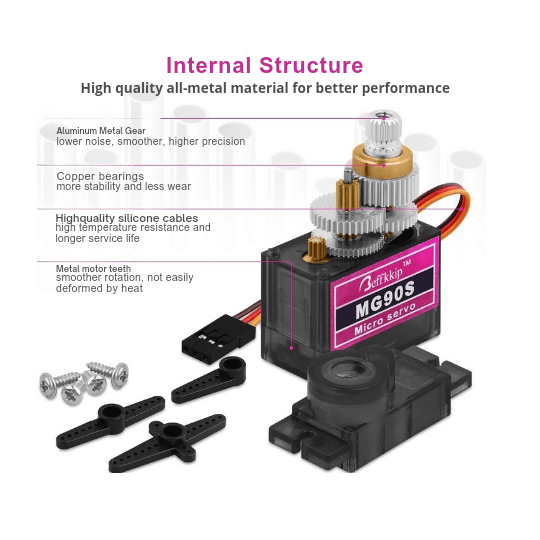
Inside the servo we have a small dc motor that turns a set of gears (increases the strength) which is attached to a potentiometer (a resistor that changes depending on rotation) and a small electronic board that includes a specialized integrated circuit (IC) or chip. This chip acts as the “brain” of the servo, controlling the motor’s position by reading the potentiometer.
It has three wires coming out, usually in these colors:
Red (or sometimes yellow/brown) = Power wire → this is like the +ve side of a battery. It gives the servo the electricity it needs to move.
Black or Brown = Ground wire → this is the -ve side, the return path for electricity. It completes the circuit so power can flow.
Orange, Yellow, or White = Signal wire (the special one!) → this is like the remote control channel. The Arduino sends quick pulses (like Morse code blinks) through this wire to say ‘move to 90 degrees’ or ‘go to 0 degrees and hold it there.’
TURL-X’S head is controlled by a small servo called the SG90S. SG probably stands for small gear and 90 because it weighs (originally) 9 grams.
When it comes to servos, speed, size and torque are the most important considerations.
Torque is what we really worry about. Torque is how strong the arm is. The SG90S is rated at 1.8kg (stall), which means it can lift 1.8kg one centimeter from the centre of it’s shaft before failing (at 6V).
Servos are very expensive but the SG90S is relatively cheap for a servo and they are nice and small. But they do tend to fail a lot. The gears break, the electronics fail from over-heating or poor manufacturing, but TURL_X’s head is very light weight so we should have no problem at all.